
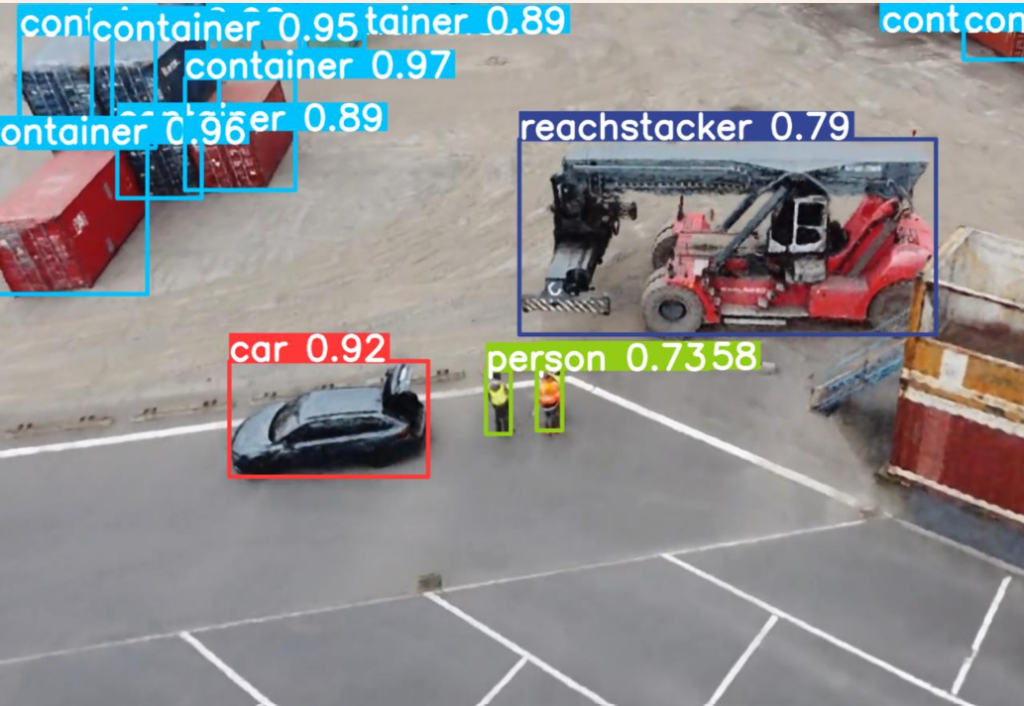
Object Recognition from UAV Perspective
InteGreatDrones focuses on the automated, visual identification of load carriers for the digitalization of port processes using drones. Object recognition from a UAV perspective is a basic prerequisite for this. Only by recognizing the transport units is it possible to assign them to their ID number and ultimately identify them. The recognition of transport units and their localization in images is currently not commercially available due to the UAV perspective and the specific port environment and is an open field of research. Using corresponding images from drone flights, we train and develop our own robust AI models and algorithms for the use case.
Digitalization with Vehicle-mounted Sensors
In addition to monitoring using drones and fixed infrastructure, data is recorded in the terminal with the help of vehicle-mounted sensors. To this end, we are developing a sensor box equipped with various sensors to attach to reach stackers and terminal trucks. GPS modules for precise location determination, distance sensors for monitoring the loading status and cameras enable comprehensive mapping of the terminal environment. The data collected is pre-processed in real time on an edge device and then integrated into the port operator's systems.

Digital Twin for Process Monitoring
The digital twin provides a schematic representation of the port environment, parking spaces and storage areas. It visually depicts the current occupancy of the storage areas with load carriers such as containers and trailers. The interactive interface and supplementary list displays allow users to quickly obtain information such as ID, position and destination. To ensure that the database is always up to date, the digital twin is fed with data from various sensor systems and a corresponding view for operational personnel enables information to be updated and corrected.
Image processing models
In ports worldwide, image recognition technology is increasingly being used as an indispensable tool to enhance security and efficiency. By analyzing visual data in real-time, image recognition models enable precise monitoring of cargo movements and early detection of suspicious activities. Machine learning and artificial intelligence enable automated responses to potential risks, drastically reducing response times and minimizing human errors. This technology not only contributes to security but also optimizes operations by improving the efficiency of port logistics. In an era of increasing trade volumes and complex security threats, the integration of image recognition technologies represents a significant advancement for ports to meet the challenges of the 21st century.
Simulation and Synthetic Training Data
Our AI models require large amounts of images as training data. We therefore supplement images from the real world with synthetic image data from a Unity environment. The digital twin developed there is intended to represent a highly detailed digital copy of the inland terminal environment of Dresden and Riesa. This makes it possible to create new and difficult-to-generate data such as weather effects on containers and video material in certain wind, weather and daytime conditions. In addition, the environment allows us to simulate drone flights without using a lot of resources in order to determine optimal routes and camera angles for overflights.
License Plate Detection
In addition to containers, InteGreatDrones also deals with truck trailers and craneable trailers. License plates are an important source of information for their identification. With the help of object detection of rare classes, the relevant area of high-resolution camera images containing the license plate can be extracted. Using a segmentation mask, the orientation of the plate can be calculated so that it can be straightened using a shearing process. Finally, we use OCR (Optical Character Recognition) to determine the letters and numbers, which helps to understand which vehicles and trailers are currently in the terminal and is therefore essential for process monitoring and security.
